
Conflict Detection
Situational Awareness
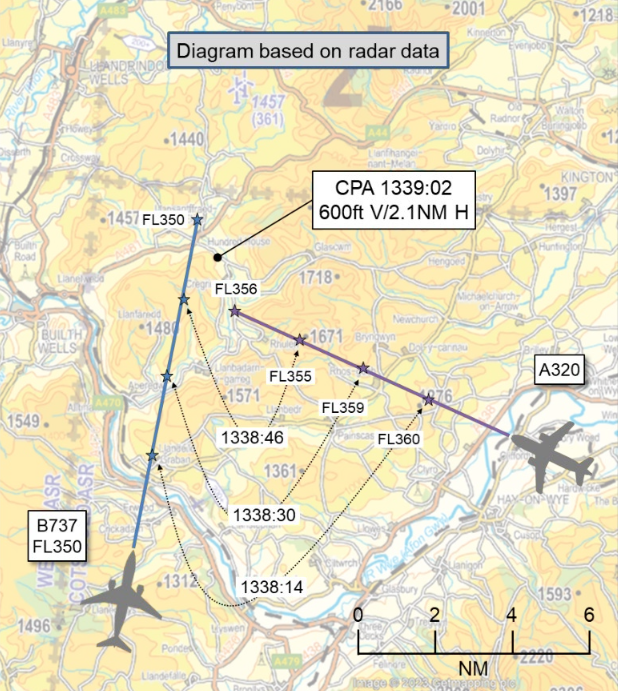
Airprox 2023054 Chart
Air traffic controllers’ situational awareness is essential for safe separation. However, human cognitive factors can lead to occasional “blind spots”.
EUROCONTROL TOP 5 Operational Safety Priorities identified controller “blind spots” as being the cause of more than half of En-Route Separation Minima Infringements in 2024.
Modern ATC systems use Medium-Term Conflict Detection (MTCD) tools to aid controllers situational awareness by detecting potential conflicts (loss of separation minima) within a sector up to 20 minutes in advance.
While MTCD tools improve situational awareness, they have two main limitations in addressing controller “blind spots”:
They do not detect conflicts with aircraft in adjacent sectors, which can result in missed conflicts near sector boundaries (see: AIRPROX REPORT No. 2023054).
They are sensitive to errors in predicted trajectories, especially in time and altitude.
These limitations stem from inefficient algorithms that are not resilient to errors in predicted trajectories.
New Conflict Detector

Conflict Classification
The Via Technology conflict detector addresses these limitations by approaching conflict detection from a different perspective:
It quickly and accurately identifies where aircraft may lose lateral separation before assessing time and vertical separation.
It also applies increased (traffic) separation minima to detect conflicts that could occur if an aircraft deviates from its predicted trajectory.
This new approach increases capacity and resilience to trajectory errors.
Accuracy
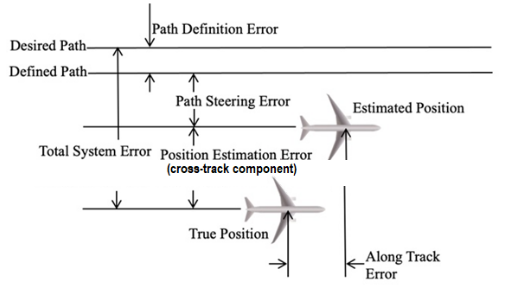
ED-323 MOPS Lateral Navigation Errors
Conflict detection identifies potential losses of separation between aircraft trajectories.
According to the “garbage in, garbage out” principle, conflict detection accuracy depends on the accuracy of aircraft trajectory data, which varies across dimensions.
Conventional MTCDs calculate aircraft separation at common estimated times. However, these times are often volatile and inaccurate, as they are affected by many factors, not least being the accuracy of wind and temperature forecasts.
Aircraft flying in controlled airspace must meet lateral navigation performance standards and are not permitted to deviate from their planned route unless instructed by ATC.
Therefore, lateral separation between aircraft trajectories is stable.
It is unaffected by trajectory prediction errors.
Lateral Separation
A pair of conflict paths (in red) for two trajectories
Two aircraft are separated if their flight paths are separated by the minimum horizontal distance. If not, we calculate a pair of conflict paths, which are the sections of their flight paths where lateral separation may be lost.
Conflict Paths
Conflict paths are not conflicts; they are locations where lateral separation can be lost:
Horizontal (longitudinal) separation is the minimum time interval between aircraft along their pair of conflict paths.
Vertical separation is the minimum altitude difference between aircraft along their pair of conflict paths.
June 2019 Results

Test System Mean Results for June 2019
A test system was built to evaluate the conflict detector with data from the Eurocontrol Aviation Data Repository for Research.
The following results were obtained using data from June 2019 (the busiest month in the data repository) with 968380 flights:
| Airborne Flights | Conflict Paths | Traffic | Conflicts | Processing Time (ms) | ||
|---|---|---|---|---|---|---|
| Mean | 2522 | 495 | 23 | 10 | 28 | |
| % | 19.63% | 0.91% | 0.4% | |||
| Max | 4146 | 2467 | 210 | 165 | 480 |
The system detects pairs of conflict paths for just under 20% of the airborne flights. Therefore, over 80% of potentially conflicting flights are eliminated by just calculating their lateral flight path separation.
The system detects traffic for just under 1% of the airborne flights and conflicts for about 0.4% of airborne flights. Therefore, the applied traffic separation minima detected approximately 2.5 times as many possible conflicts as the standard separation minima.
Conflict Detector Performance
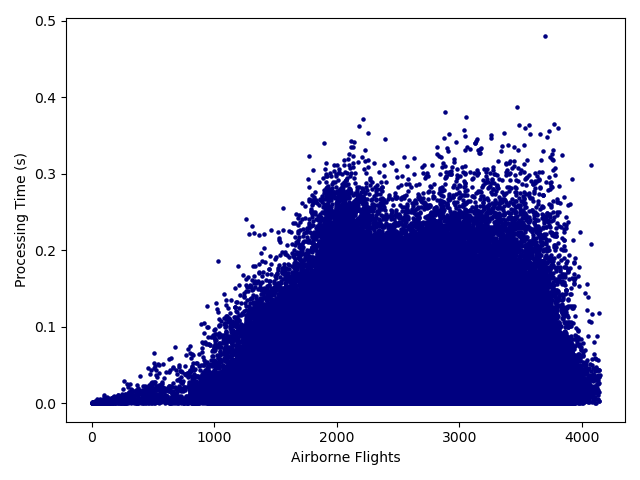
Conflict Processing Times for June 2019
The graph shows the processing times required by conflict detector
to detect all potential conflicts between airborne flights
in the test system with the Flight_Points_Filed_20190601_20190630.csv file.
The system took an average of 28ms to detect conflicts with an average of 2522 airborne flights. This corresponds to an average of just over 11 µs to detect a conflict between two flights.
The conflict detector calculates horizontal separation on the WGS-84 ellipsoid. It was built with rustc 1.94.1 and run on a 16-core AMD Ryzen processor with 32GB of RAM.
The conflict detector uses the Rust rayon library to detect conflicts across all 8-cores/16-threads of the processor it runs on.
The processing time would be reduced if the system were run on a processor with a higher core count.
Conclusions

MTCD and Via Technology Conflict Classifications
The Via Technology conflict detection algorithm increases capacity by harnessing aircraft lateral navigation accuracy to exclude laterally separated trajectories.
The algorithm further increases capacity by identifying conflict path pairs, where lateral separation may be lost, enabling time and altitude separation to be calculated within them.
These conflict path pairs enable faster calculation of time and altitude separation, further increasing capacity.
Conflict path pairs remain stable unless an aircraft is rerouted by ATC. A conflict detector using this algorithm can further increase capacity by storing conflict path pairs; only recalculating time and altitude separation when trajectory times change, or altitude clearances are given.
The algorithm harnesses its increased conflict detection capacity to provide resilience against inaccurate trajectory times and/or altitudes, by detecting traffic with larger time and altitude separation minima than those used to detect conflicts.
Therefore, this conflict-detection algorithm can help address air traffic controller “blind spot” challenges, including:
overlooked conflicts with aircraft in adjacent sectors,
and overlooked conflicts caused by predicted trajectory time and/or altitude errors
Ready to improve your conflict detection capabilities?
Contact us at: enquiries@via-technology.aero
to arrange a consultation.
Contact us